
















アイパイロットユニットとヘディングセンサーの役割
このページでは、アイパイロットとヘディングセンサーの役割について解説します。
1.アイパイロットユニットの役割
〔役割1〕全動作を制御するインターフェース的役割
アイパイロットユニット搭載機種は、下記操作を全て付属のBTリモコンで行います。
・プロップを回す(進む)
・ロワユニットの向きを左右に回転させる(曲がる)
・スポットロックの制御(定点維持制御)
・オートパイロットの制御(一定方向微速ライントレース)
・iTrackの制御(航行軌跡再トレース)
・クルーズントロールの制御(対地一定速度航行速度制御)
・その他、前掲各機能に関わる全初期設定、全カスマイズ設定
詳しくは、EASTLAND MARINE別館のアイパイロットリモコン操作説明書をご覧下さい。
〔役割2〕GPS受信による自船位置認識
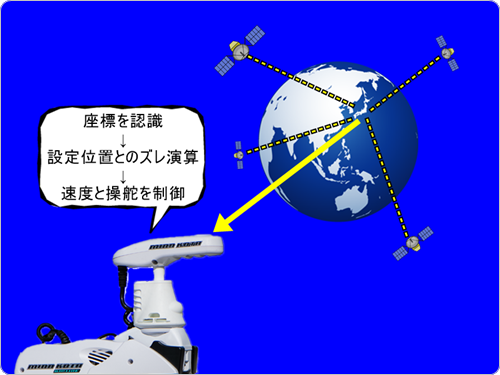
地球上のどこにアイパイロットユニットが位置しているかを点で認識します。
アイパイロットユニットは、方位(線)は一切認識出来ません。あくまでも地点座標(点)のみを認識する機器です。AAP機能を使用する際も、実は方位は認識しておりません。HDSS無しAAPの場合、徐々に方角が狂うのはこの事に起因しております。
2.ヘディングセンサーの役割
〔役割〕方位(線)を認識し、IPユニットへ方位情報を常時送信

ボートのキールラインが向いている方向をIPユニットへ常時送信します。その為には、ヘディングセンサー中央にある方位マークと船体のキールラインが平行になる様に設置されている必要が有ります。
ヘディングセンサーは、位置座標は認識出来ません。
ヘディングセンサーは、位置座標は認識出来ません。
3.アイパイロットユニット+ヘディングセンサー
アイパイロットユニットにヘディングセンサーを追加する事で、下記機能が追加されます。詳しくは別ページで説明します。
◆スポットロック使用時は、キールラインに対し相対的に前・後・右・左方向へ約1.5mの移動が行えるジョグ機能。
◆オートロット使用時は、超正確なライントレースが可能となります。
詳しくは、【ヘディングセンサー有無による動作の違い】をご覧下さい。
以上です。アイパイロットユニットにはNon-BTの旧型時代からAPがついてましたので、方位が認識出来ないのは意外ではありませんでしたか?!
関連記事
ヘディングセンサー有無による動作の違い
誤解の多いヘディングセンサー
ミンコタに関する情報をSNS配信しております。
Instagramオフィシャルアカウント
facebookオフィシャルアカウント
YouTubeオフィシャルアカウント
ご不明点は、お気軽にEASTLAND MARINE迄お問合せ下さいませ。
メールによるお問合せはコチラ
公式LINE友達追加はコチラ
電話によるお問合せはコチラ
出来る限りメール、公式LINEにてお問合せ頂きます様、ご協力をお願い致します。
*携帯ドメイン(docomo,softbank,ezweb)は、予め当店からのメール受信が出来る設定をお願いします。
*hotmail、outlookメールからのお問合せは対応出来ません。
?
〔戻る〕